Nvidia a annoncé des mises à jour de ses outils de simulation robotique qui permettront aux entreprises de construire et de tester des robots virtuels dans une variété d’environnements réalistes et de conditions de fonctionnement, le tout en toute sécurité dans un environnement cloud.
Révélées au CES, les améliorations apportées à Isaac Sim, la boîte à outils de simulation robotique de Nvidia, incluent la possibilité de simuler le comportement des personnes dans des environnements tels que des entrepôts ou des usines de fabrication, afin d’aider les robots collaboratifs (cobots) ou les robots mobiles autonomes à comprendre et à identifier les comportements courants et les obstacles potentiels auxquels ils seront confrontés dans le monde réel.
Selon Nvidia, les améliorations apportées à la plateforme robotique accéléreront le développement et le déploiement de robots autonomes en facilitant le développement, la validation et le déploiement de l’intelligence artificielle (IA) qui les anime, garantissant ainsi qu’ils peuvent fonctionner avec succès et en toute sécurité dans divers environnements.
« La simulation est la technologie essentielle qui permettra de développer les systèmes logiciels complexes qui alimenteront la prochaine vague de robots plus intelligents et plus autonomes. Dans la simulation, les robots virtuels disposent d’un terrain d’essai pour leurs piles logicielles complexes et leur multitude de modèles d’intelligence artificielle », explique Gerard Andrews, chef de produit senior chez Nvidia.
Précision et sécurité
En ajoutant des simulations de comportement humain et d’interaction dans des environnements, comme ramasser et déplacer des objets, pousser des chariots et se déplacer vers de nouveaux endroits, il est possible de tester comment l’ajout de robots à l’environnement pourrait se dérouler, sans mettre les gens en danger.
Les événements courants – comme les personnes interagissant avec des environnements industriels ou se déplaçant dans un entrepôt – et les événements moins courants – comme les urgences inattendues et d’autres scénarios – peuvent être simulés afin d’aider à construire des robots capables de réagir de manière appropriée aux situations dans des environnements parfois très chargés.
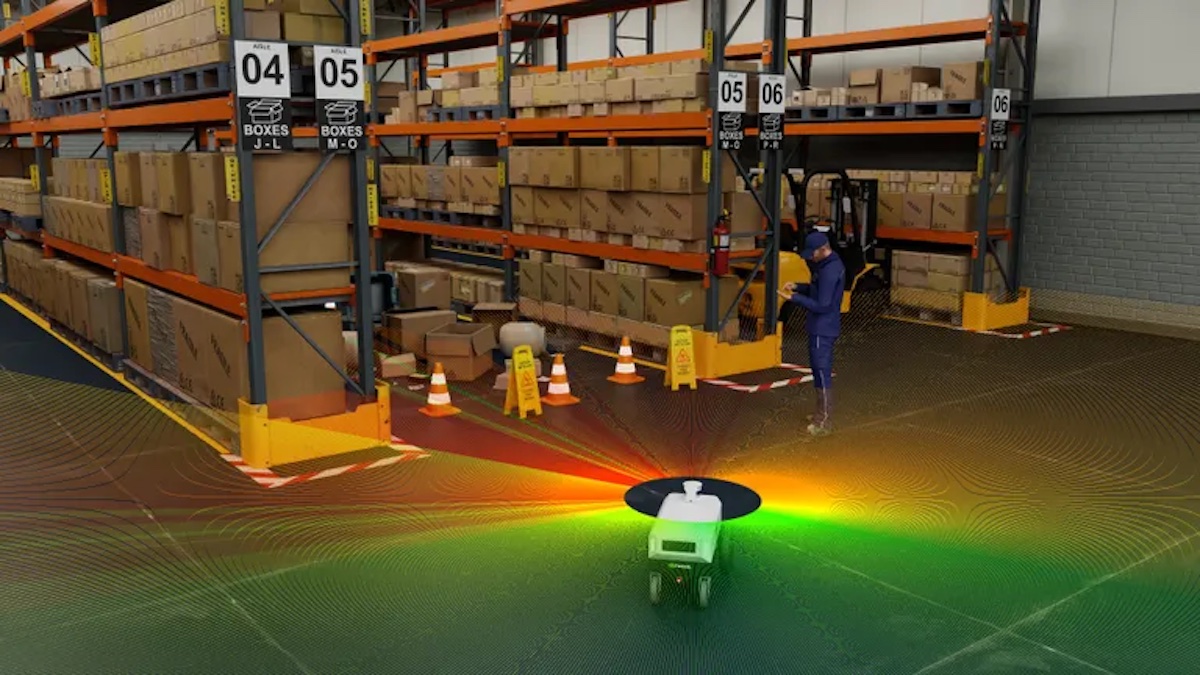
A cette fin, en utilisant la technologie Nvidia RTX, Isaac Sim a amélioré la prise en charge des capteurs, ce qui lui permet de rendre en temps réel des données physiquement exactes provenant de capteurs, y compris le ray tracing pour fournir des données de capteur plus précises dans diverses conditions d’éclairage ou en réponse à des matériaux réfléchissants.
Cela permet aux mondes simulés d’être basés sur des modèles de capteurs physiquement précis, en minimisant les différences entre la simulation et l’environnement réel, afin de garantir que les robots sont formés aussi précisément que possible.
Des robots virtuels accessibles sur le cloud
La nouvelle version d’Isaac Sim fournit également de nombreux nouveaux actifs 3D prêts à la simulation – y compris des pièces d’entrepôt et des robots populaires, afin que les développeurs et les utilisateurs puissent rapidement commencer à construire.
Construit sur Nvidia Omniverse, la plateforme de l’entreprise pour la création et l’exploitation d’applications du metaverse, Isaac Sim est accessible via le cloud, offrant aux équipes travaillant sur des projets robotiques la possibilité de collaborer avec une accessibilité, une agilité et une évolutivité accrues pour tester et entraîner des robots virtuels.
« Grâce à l’accès au cloud et à son vaste ensemble de capacités de simulation photoréalistes et physiquement précises, Isaac Sim est prêt à établir de nouvelles méthodologies pour le développement de robots intelligents », estime Gerard Andrews.
Les autres annonces du CES 2023
Source : ZDNet.com